Niniejszy artykuł ma na celu opis mapowania obiektów infrastruktury kolejowej za pomocą technologii SLAM, czyli mobilnego skanowania 3D przy użyciu skanera GeoSLAM ZEB-Horizon (więcej o nim: https://3d.tpi.com.pl/produkt/geoslam-zeb-horizon/)
Przedmiotem porównania jest dworzec PKP w Rumii, a konkretniej jego budynek oraz otaczająca go infrastruktura, taka jak urządzenia komunikacyjne, trakcja kolejowa, czy fragmenty torowiska.

Wyniki zostaną porównane do mapy narysowanej w oparciu o klasyczne metody pomiaru.
Aby mapowanie wykonane skanerem był osadzone w docelowym układzie współrzędnym, spójnym z mapą, zostały zmierzone i oznaczone 4 punkty w otoczeniu budynku. Pomiar wykonano odbiornikiem GNSS Topcon Hiper VR.

Pomiar skanerem zajął niecałe 13 minut. Tak jak jest to widoczne na poniższym zdjęciu, trajektoria ruchu skanera kilka razy się przecinała oraz 2 z 4 punktów zostały oznaczone dwukrotnie podczas skanowania.
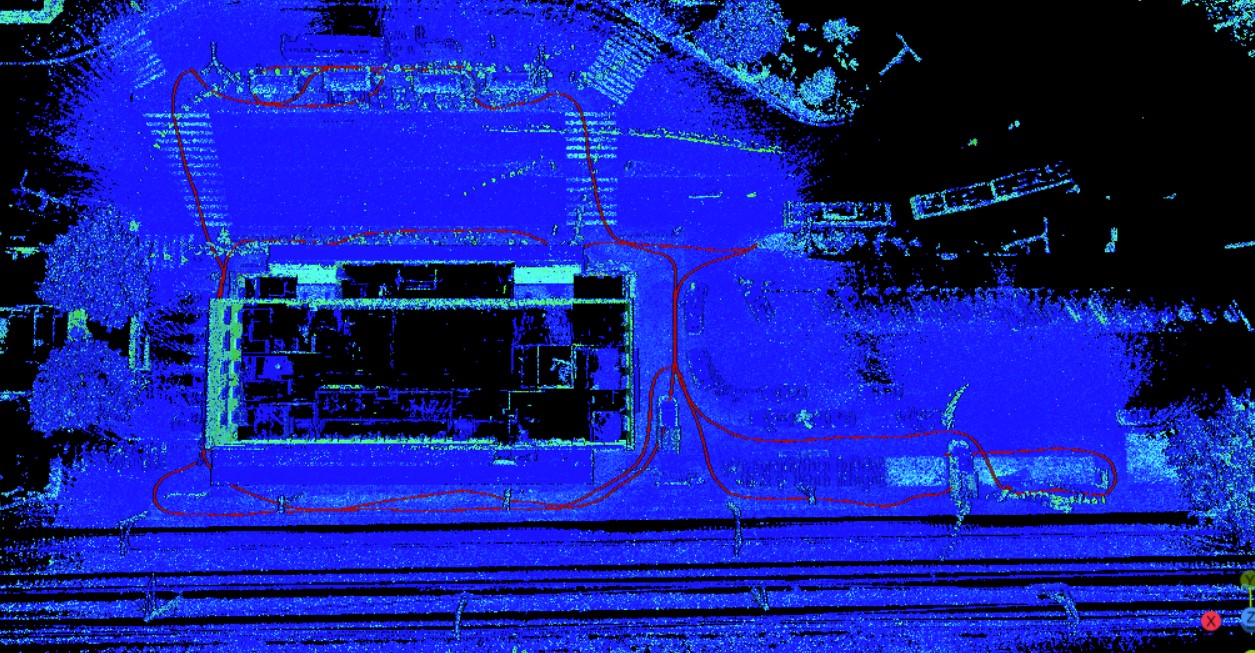
Wynikiem jest chmura punktów zawierająca niecałe 60 milionów punktów osadzona w układzie współrzędnych.

Chmura punktów została dopasowana do układu współrzędnych z następującymi błędami:
| Numer punktu | Błąd w osi X [cm] | Błąd w osi Y [cm] | Błąd w osi Z [cm] | Błąd 3D[cm] |
| P1 | 0.5 | -1.7 | 0.2 | 1.8 |
| P2 | -0.7 | -0.2 | 0.3 | 0.8 |
| P3 | -0.2 | 1.3 | 0.9 | 1.6 |
| P4 | 1.0 | 1.1 | 0.0 | 1.4 |
| P2 – powtórny | -0.6 | 0.2 | 0.6 | 0.9 |
| P1 – powtórny | 0.2 | -0.5 | -1.4 | 1.5 |
| Średnia | 1.3 | |||
Docelowy średni błąd wpasowania wynosi 1.3 cm, co jest wartością porównywalną do dokładności pomiaru uzyskiwanych przez odbiorniki GNSS.
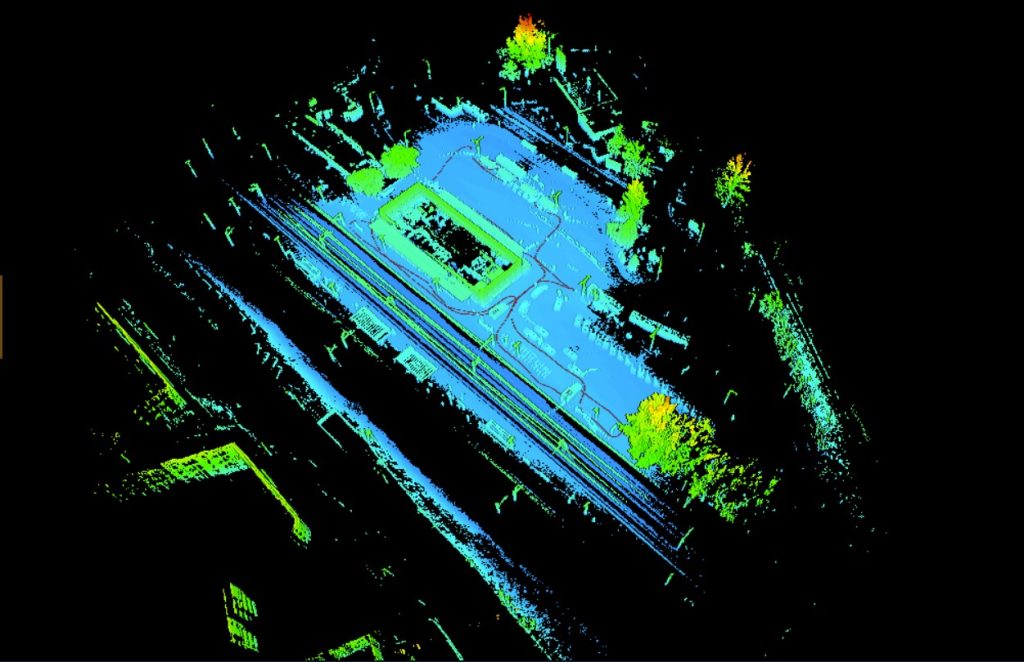
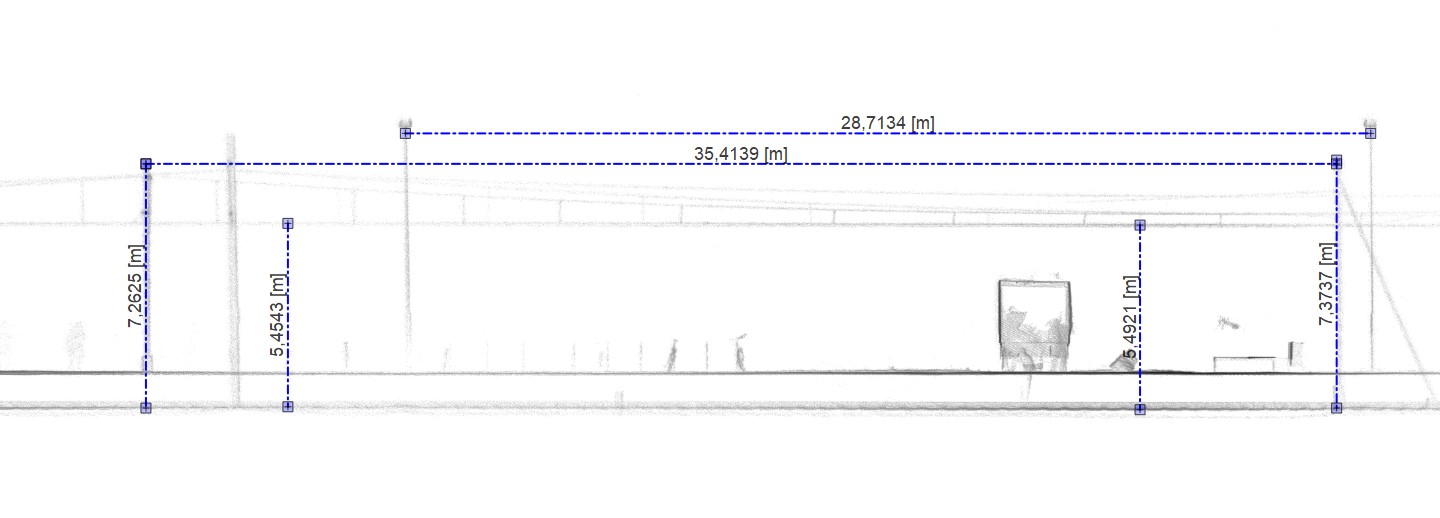
Następnie wygenerowana chmura punktów została nałożona na mapę w oprogramowaniu Bentley OpenCity Map Power View. Głównym obiektem pomiaru był budynek dworca, więc na przykładzie narożników budynku możemy zmierzyć, że maksymalne odstępstwa między mapą a chmurą wynoszą zaledwie 2-4 cm, co mieści się w klasie I szczegółów sytuacyjnych do których zalicza się budynki.
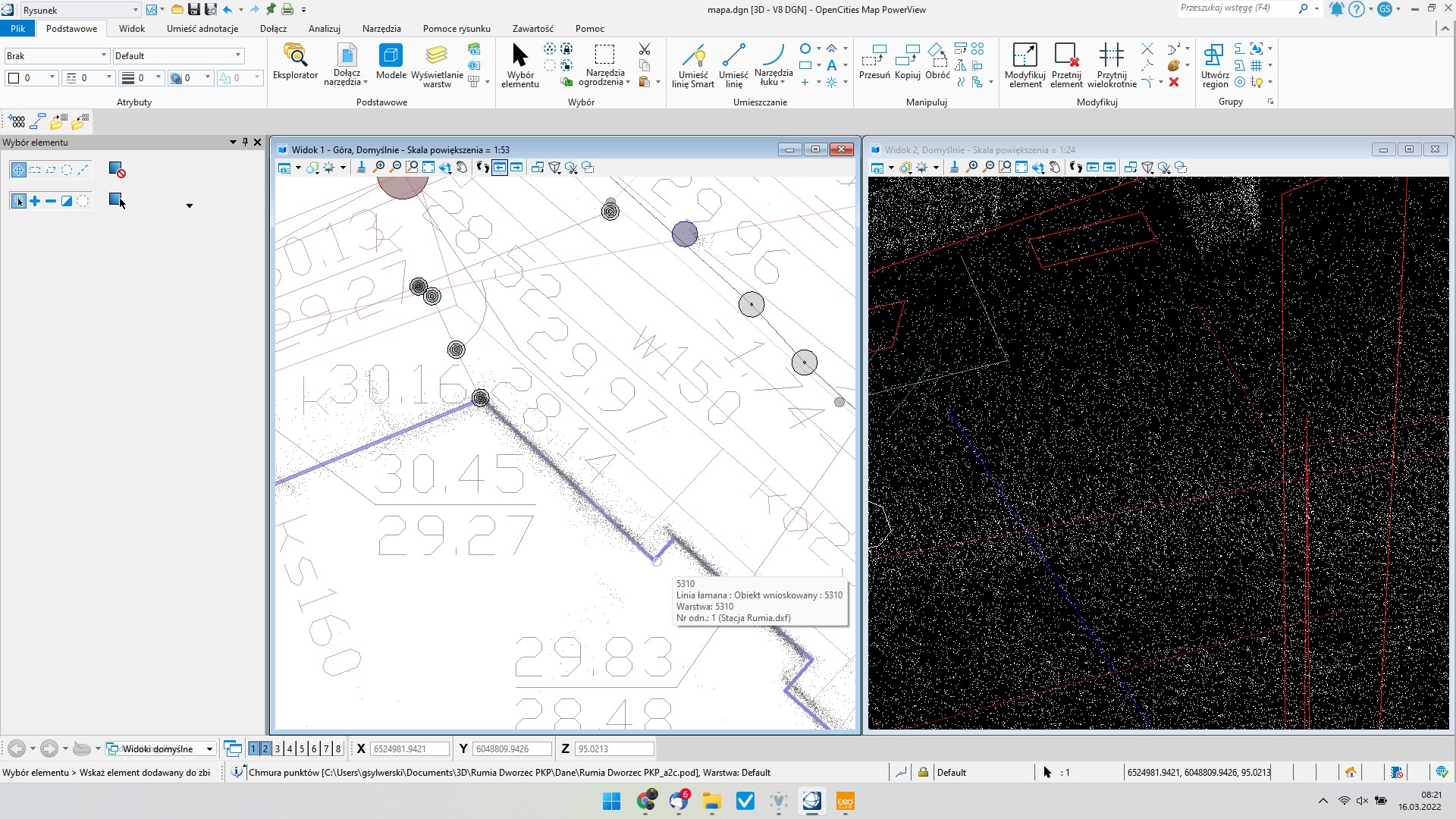
Do skanera była również podpięta kamera ZEB-CAM, z której film może być zsynchronizowany z chmurą punktów, dzięki czemu ułatwiona jest identyfikacja poszczególnych obiektów na skanie.


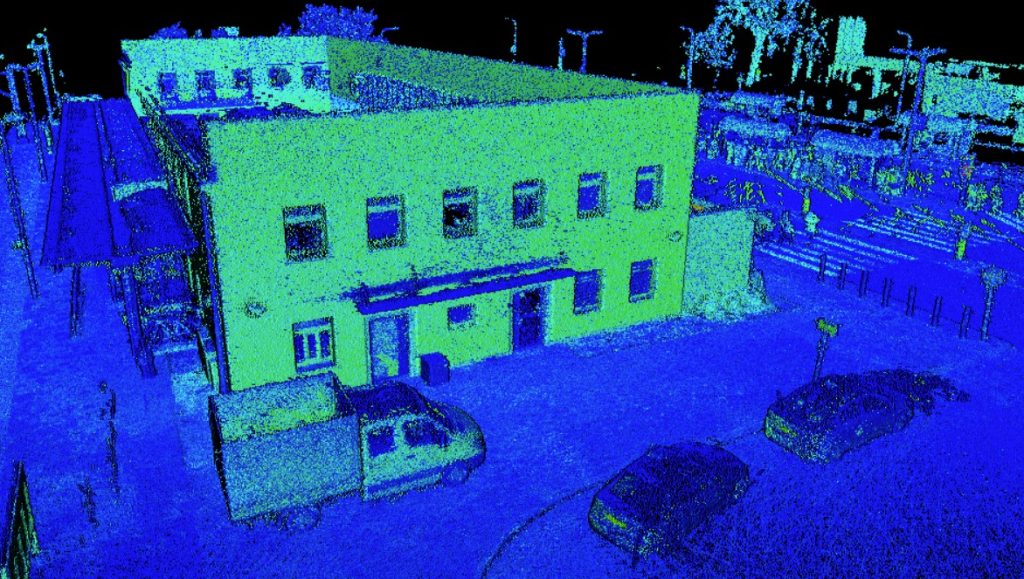
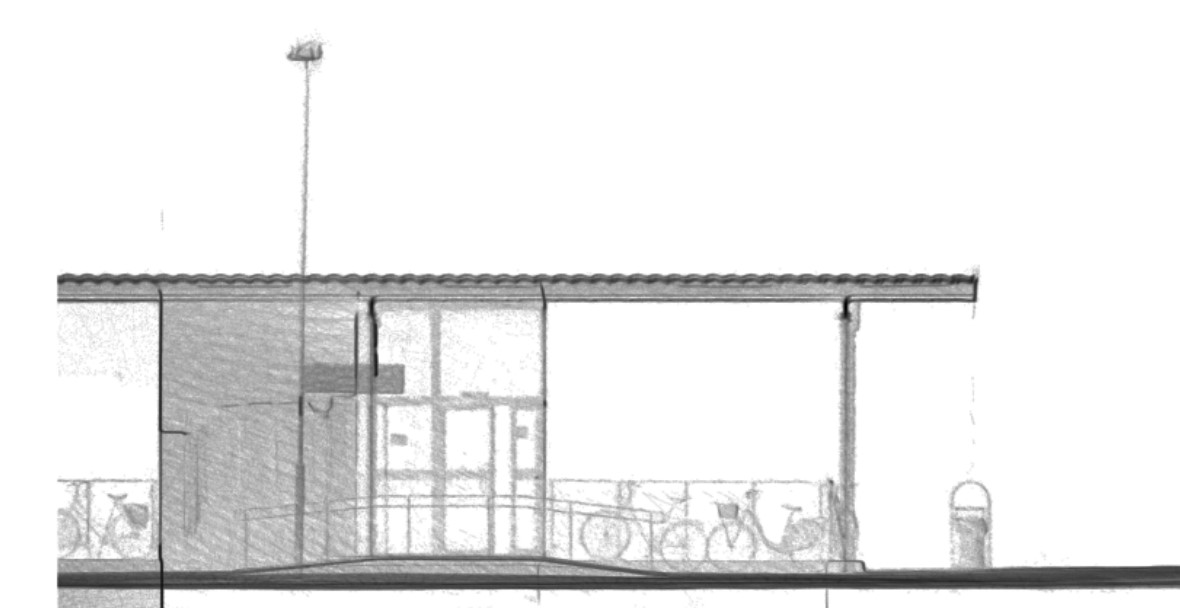
Należy zwrócić uwagę, że obiekty stanowiące przedmiot inwentaryzacji jak również mapy do celów projektowych i są często również wyszczególniane do kosztorysowania tj. barierki, wiaty, elementy stalowe, są dobrze widoczne i poza ich usytuowaniem możemy sprawdzić ich geometrię, co w klasycznym pomiarze jest często pomijane ze względu na czasochłonność.

Przyjmując stałą różnicę pomiędzy geoidą EVRF2007 (w której wykonany był pomiar), a Kronsztad 86′ (w której była mapa), zaobserwujemy stałą różnicą wysokości (około 9 cm) sprawdzoną na kilku studzienkach.
Dużym usprawnieniem i korzyścią wynikającą z zastosowanej technologii SLAM jest również możliwość uzyskania informacji o liniach trakcyjnych, dobrze widocznych na chmurze punktów.

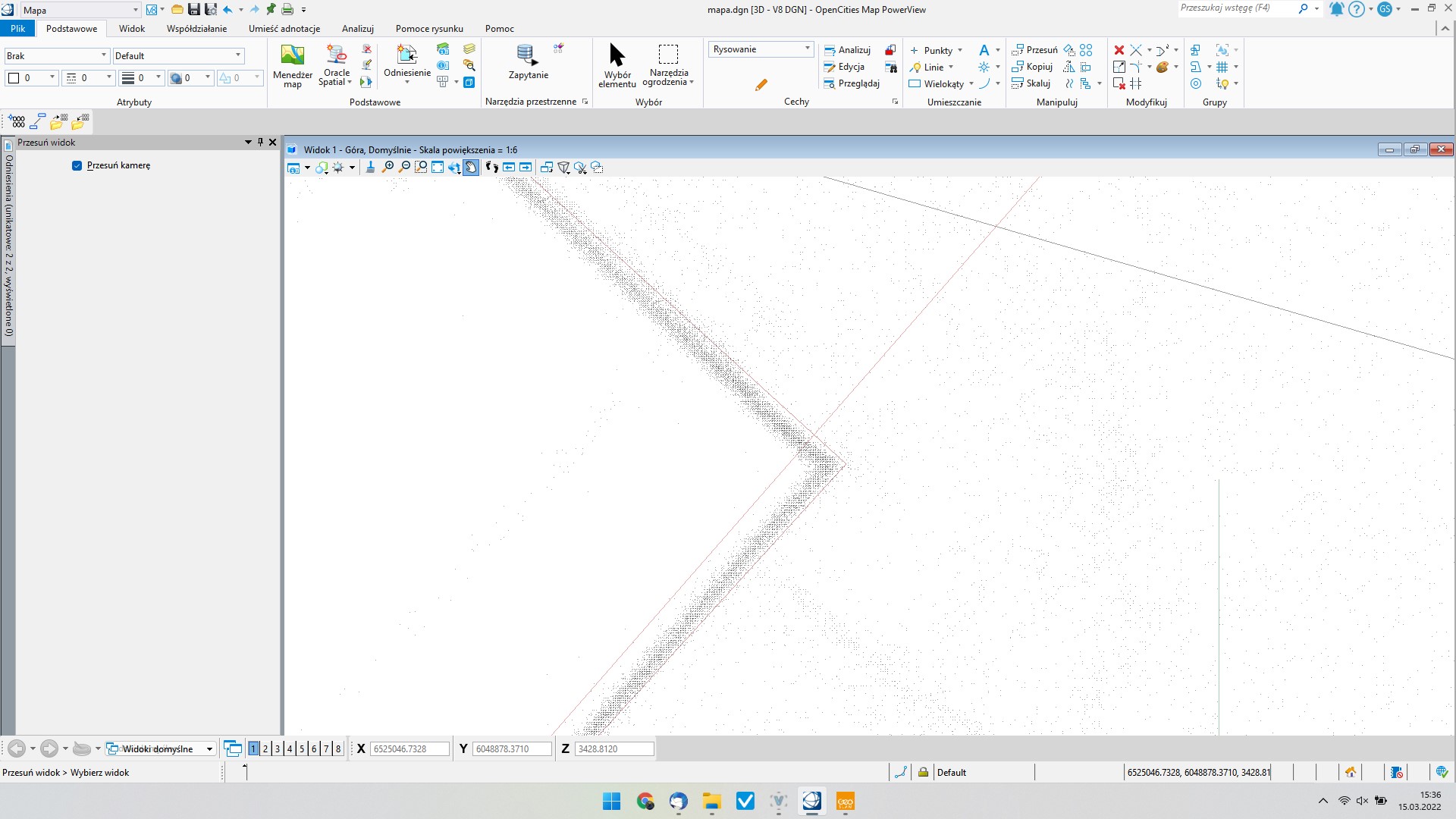
Dodatkowo zweryfikować można dokładność w maksymalnym zasięgu skanera na podstawie oddalonych o prawie 100 metrów (po drugiej stronie torowiska) bloków mieszkalnych.

Wyniki również w tym wypadku są zadowalające (mieszczą się w granicy błędu dla punktów I gr. dokładnościowej), jednak należy zauważyć, że poprawny ich pomiar byłby poprzedzony lepszym rozmieszczeniem punktów osnowy (dostosowania).
Na podstawie pomiaru opisanego powyżej można wyciągnąć następujące wnioski:
- Dokładność pozycji obiektów zeskanowanych przy użyciu skanera GeoSLAM Zeb-Horizon z wykorzystaniem punktów referencyjnych zmierzonych za pomocą odbiornika GNSS wynosi 2-4 cm, co mieści się w klasie I szczegółów sytuacyjnych do których zalicza się m.in. budynki.
- Skaner GeoSLAM skanuje całe obszar wokół siebie, więc jeśli celem pomiaru jest np. budynek, to na chmurze punktów będzie też widoczne całe jego otoczenie. Dzięki czemu pozyskanie informacji przestrzennej o np. położeniu drzew, czy krawężników, nie wymaga dodatkowego pomiaru, lecz możne je pozyskać z zebranych już danych.
- Czas pomiaru całej infrastruktury skanerem względem pomiaru metodami klasycznymi może być nawet 10-krotnie krótszy.
- Interpretacja danych jest łatwiejsza dzięki zastosowaniu zsynchronizowanych danych video. Nie ma potrzeby robienia szkiców. dane mogą być opracowywane przez osoby nie uczestniczące w pomiarze.
- Mobilne skanowanie 3D jest to bardzo uniwersalna technologia. Może być stosowane zarówno przy pomiarze budynków, jak i dużych obszarów terenu lub ciągów komunikacyjnych, tuneli, mostów.
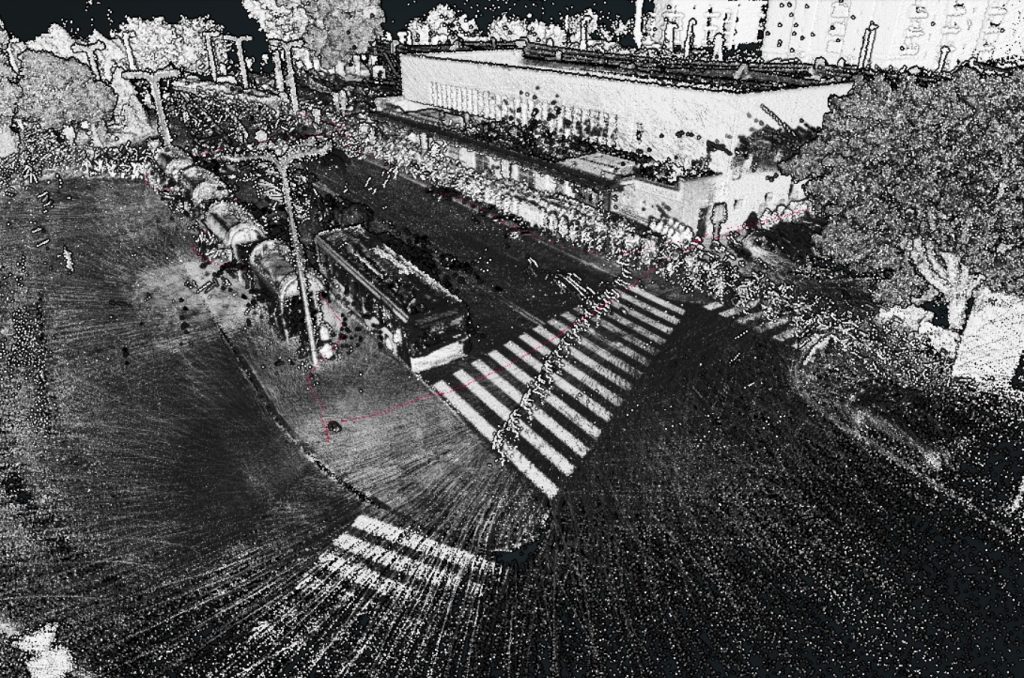
- Pomiar za pomocą skanera nie wymaga szczególnych warunków. Skanowanie zostało wykonane w porze dziennej przy słonecznej pogodzie oraz przy obecności wielu osób postronnych. Osoby te zostały zarejestrowane przez skaner na chmurze punktów, lecz ich występowanie w żaden sposób nie przeszkadza w pozyskaniu interesujących nas danych przestrzennych.
- Dane ze skanowania skanerem GeoSLAM bardzo dobrze się uzupełniają z danymi z sensorów LiDAR zebranymi z platform UAV, dzięki czemu możliwe jest uzyskanie geometrii całego budynku wewnątrz oraz z zewnątrz z poziomu gruntu oraz z powietrza.
Karol Derejczyk, Grzegorz Sylwerski



