

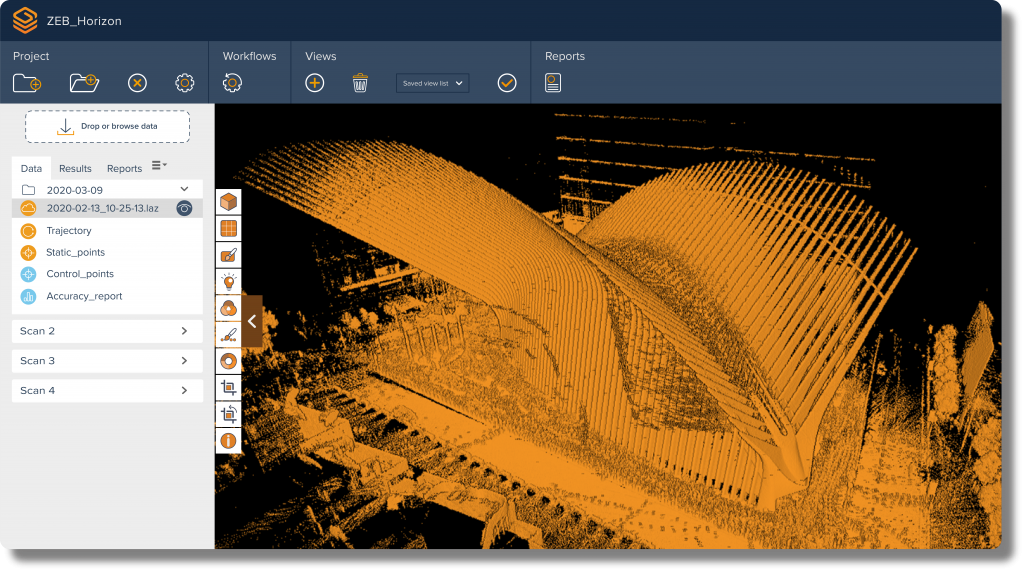
Oparte na wiodącym na świecie algorytmie SLAM wraz z wizualizacją 3D danych, dodatkowym przetwarzaniem i filtrowaniem, narzędziami do automatyzacji przepływu pracy i integracją z aplikacjami innych firm. Po naciśnięciu jednego przycisku Twoje dane zostaną automatycznie przetworzone w GeoSLAM Connect, zapisane w wybranym przez Ciebie folderze i przygotowane do kolejnego etapu Twojej pracy.
W Connect scharakteryzowano typowe scenariusze przechwytywania danych, takie jak UAV, zewnętrzne, wewnętrzne, liniowe i samochodowe, a także zdefiniowano wstępne ustawienia przetwarzania danych dla każdego środowiska. Można je wybrać na początku etapu przetwarzania danych, co pozwala na znaczne uproszczenie tego procesu.
Znane punkty kontrolne są przechwytywane podczas skanowania i automatycznie porównywane i dopasowywane do powiązanych współrzędnych podczas etapu przetwarzania w Connect. Do zbioru danych można dokonać sztywnej i/lub niesztywnej korekty, a raport dokładności jest eksportowany, podkreślając, jak udana była transformacja.
Obie metody dopasowują dane skanowania z systemu ZEB Locate do danych GPS zebranych z anteny w celu georeferencji chmury punktów. Gdy skanowanie zaczyna się i kończy w tym samym miejscu, jest to klasyfikowane jako „zamknięta pętla”. „Otwarta pętla” ma miejsce, gdy pozycja początkowa i końcowa skanowania znajdują się w różnych lokalizacjach. Standardowe praktyki SLAM dotyczą obu metod gromadzenia danych.
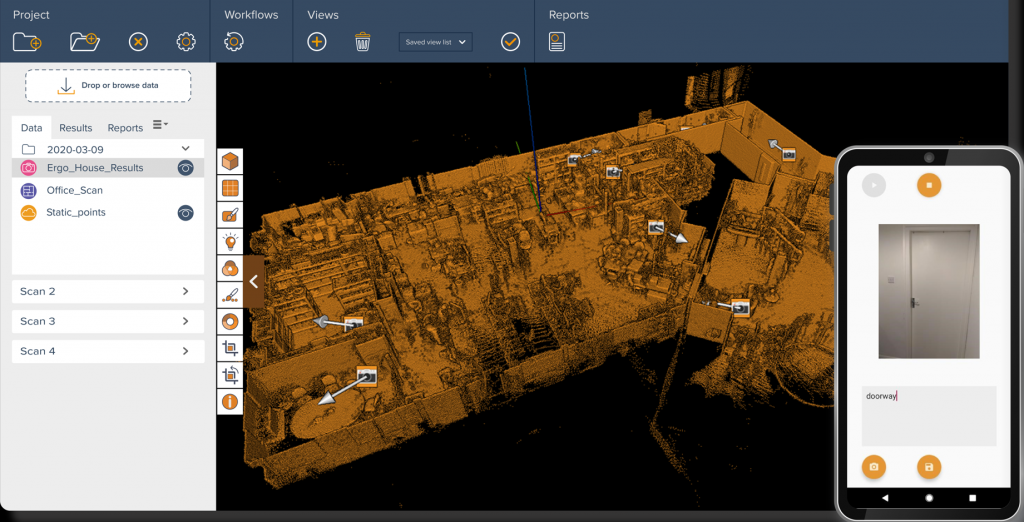
Wspólne punkty statyczne są rejestrowane podczas kilku skanowań, co oznacza, że te zestawy danych mogą być automatycznie dopasowywane. Pojedyncza chmura punktów jest następnie eksportowana tak, jakby dane zostały przechwycone w jednym skanie.
» Poziome i pionowe przekroje mogą być pobierane z dowolnego miejsca w chmurze punktów.
» Przekroje podłogowe mogą być automatycznie pobierane na określonej wysokości nad podłogą, zdefiniowanej w
etapie przetwarzania.
» Automatycznie tworzony jest obraz PNG, który może być wykorzystywany w oprogramowaniu innych firm.
» Chmury punktów mogą być porównywane, a obszary obszary zmian są automatycznie wyróżniane.
» Można je także porównywać z modelami CAD.

Technologia. Pomiar. Innowacje. Skanowanie 3D. Od ponad 30 lat dostarczamy optymalne i skuteczne rozwiązania pomiarowe uwzględniające aktualny rynek.
Gwarantujemy SUPER treści!
You have successfully joined our subscriber list.